本页未翻译。您正在浏览的是英文版本。

Tomáš Sasko
Jun 30, 2026
Terrain is a critical input for energy simulations as it dictates the geometric and physical reality of a power plant's performance.
Since utility-scale PV projects are often built on complex terrain, not perfectly flat plots of land, taking into account specific terrain features such slopes, hills, valleys or ridges is a key factor for ensuring the accuracy of PV simulations and subsequent energy yield estimates.
To bridge the gap between bankable estimates and real-world performance, developers should move beyond "cosmetic" 3D models and adopt a truly integrated terrain-adapted workflow.
Topography affects solar output in two primary ways: Optically, by altering shading patterns and the portion of the sky visible to the modules; electrically, by influencing operating points and losses related to solar irradiance variability, temperature, and angle of incidence.
When simulations rely on simplified "flat-terrain" models or low-resolution data, they introduce systematic errors that fail to capture the local variations in slope and orientation found on irregular grounds.
Consequently, terrain-adapted design is essential not only to identify mechanical risks such as table-to-ground collisions in tracker systems but to ensure that the resulting energy yield estimates are accurate, bankable, and reflect the actual physical conditions of the site.
PV layout design should reflect real terrain not only to reduce construction risk, but also to avoid inaccuracies in power output estimates. However, the industry frequently suffers from a "weak link" between design and simulation. While a PV designer might create a detailed 3D layout, many simulation engines simplify that geometry back to a flat or "smoothed" approximation.
The terrain, including row-to-row shading, varying tilt angles, and local obstructions, is effectively erased in the calculation process.
Failing to preserve real-world topography in the simulation step leads to systematic inaccuracies in yield estimates and obscures construction risks that only become apparent during the costly execution phase.
The first challenge is obtaining and importing terrain data into the PV design tool. The prerequisite, of course, is using software that supports terrain-adapted design.
The industry still uses a wide range of terrain sources. Many tools rely on global DEM (Digital Elevation Model) layers with 30 to 90 meter grid resolution, but this data is often several years to decades old - adequate for early screening, but it can be misleading in mountainous terrain, in valleys, on terraced land, or on sites shaped by earthworks, roads, and drainage.
For detailed design you typically need to import your own terrain. The most robust format in practice is GeoTIFF, because it carries georeferencing information in the file header. When you load multiple tiles, they can align correctly without manual stitching.
This leads to a key point that is easy to overlook. “Terrain” is not always terrain. Remote sensing products such as LiDAR (Light Detection and Ranging) may include tree canopies, buildings, or temporary structures. Sometimes that is exactly what you want, because it can capture near shading without manually modelling every obstacle. Sometimes it is a problem, because artefacts can behave like solid barriers in a 3D mesh.
Power lines, for example, can be reconstructed as a wall rather than a cable in the air, which then produces unrealistic shading and false collisions. Terrain data needs scrutiny before it becomes design truth. The choice of terrain model vs. surface model depends on the tools used in the design software.
Even when you have good terrain, you face a different constraint: computation.
A detailed LiDAR or drone scan produces a so-called ‘point cloud’ that can be many gigabytes large. It is often unrealistic to manipulate these raw datasets interactively in a browser-based environment, and you do not want to waste rendering resources on parts of the scene that are irrelevant to PV geometry.
A useful approach is to convert elevation data into an optimized triangular mesh that preserves the important ridgelines and breaks in slope, while reducing triangles in areas where the surface is nearly flat.
For example, algorithms such as Mapbox’s “Delatin” illustrate this principle well: you accept controlled, quantified loss in geometric fidelity in exchange for a mesh that can be rendered and edited smoothly. The goal is maximum relevance where design decisions are sensitive to slope, curvature, and local shading.
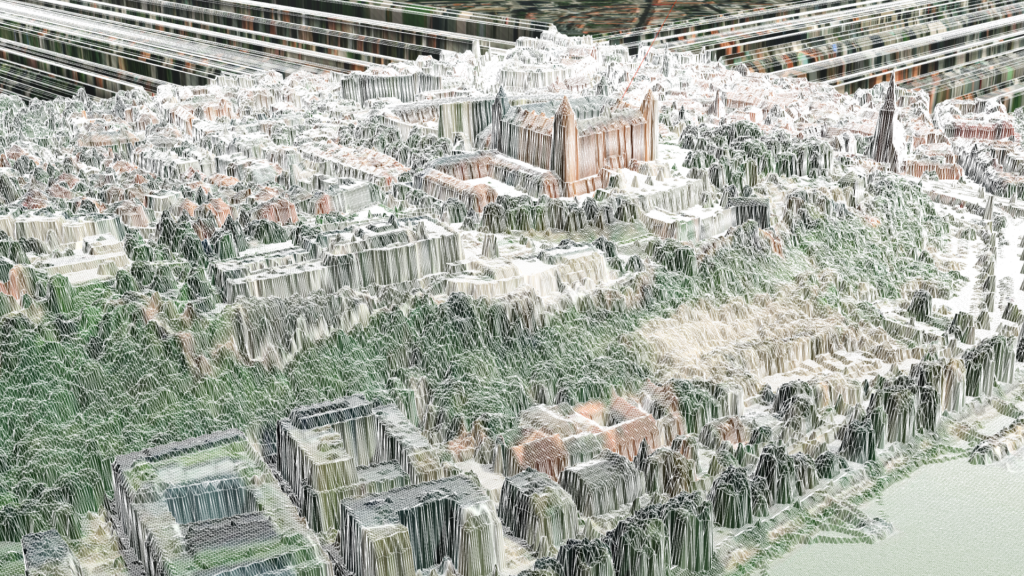
Image 1: A detailed LiDAR or drone scan captures terrain and surrounding objects and surfaces as a dense point cloud. While highly accurate, this raw dataset can be extremely large and difficult to use directly in PV design and simulation workflows.
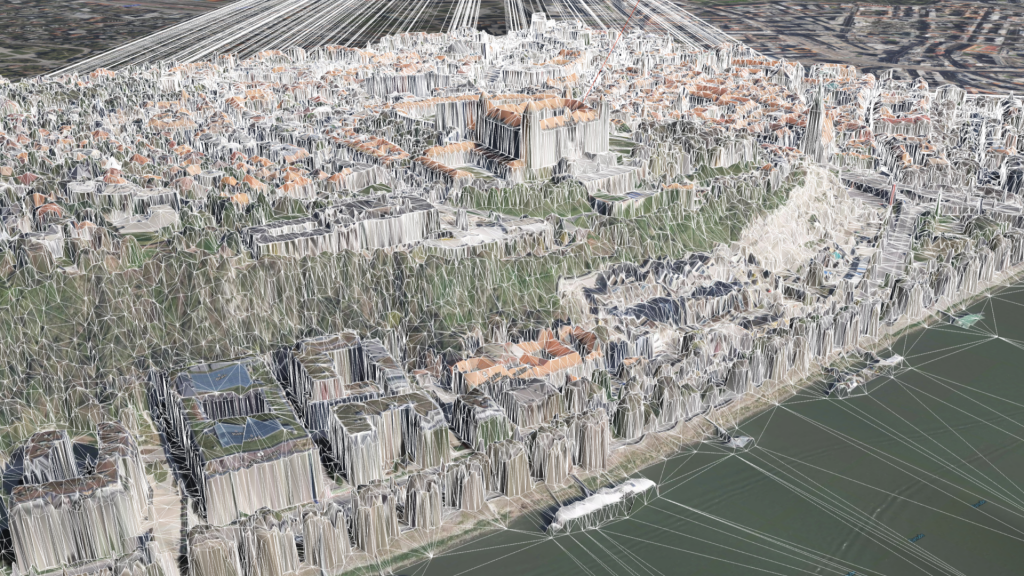
Image 2: An optimized triangular mesh preserves the terrain features that matter most for PV design, such as ridgelines, breaks in slope, and shading-relevant geometry, while reducing unnecessary complexity in flatter areas for smoother rendering, editing, and simulation.
Once terrain can be used in the design process, the next question is whether the PV layout truly conforms to it and whether the simulator works with the same terrain-conforming geometry.
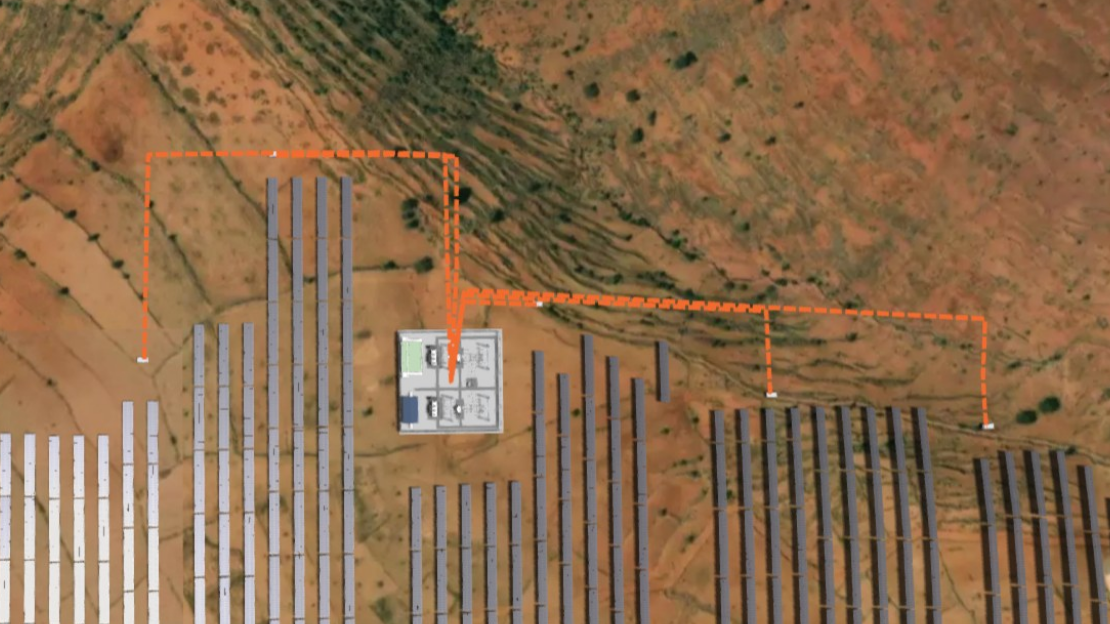
On undulating ground, table placement is never static. Row-to-row clearance, pile heights, and tracker rotations all interact with slope and local curvature. For tracker systems, this is especially critical. A table that clears the terrain at one rotation angle may collide with it at another. Checking the geometry only in a neutral position can therefore miss collisions that occur during morning or afternoon tracking, or during stow events.
A terrain-adapted layout must therefore do two things. First, it must place structures on the terrain using realistic engineering constraints. Second, it must preserve this detailed geometry during simulation, where shading and irradiance distribution are calculated. If the simulator replaces the terrain-aware design with a flattened approximation, the value of terrain-aware design is lost.
On complex terrain, collisions are not rare exceptions. They are a predictable result of steep slopes, tight clearances, and varying table heights. They can occur between adjacent tables in a deep valley, between tables and the ground when legs are too short, or between tables and equipment such as inverters placed beneath the structures.
Smart collision detection helps prevent late-stage redesign and reduces the risk of constructability issues emerging after procurement decisions have already been made. Robust software solutions detect collisions immediately as the designer edits the layout, because waiting until the final design review is often too late, and too expensive.
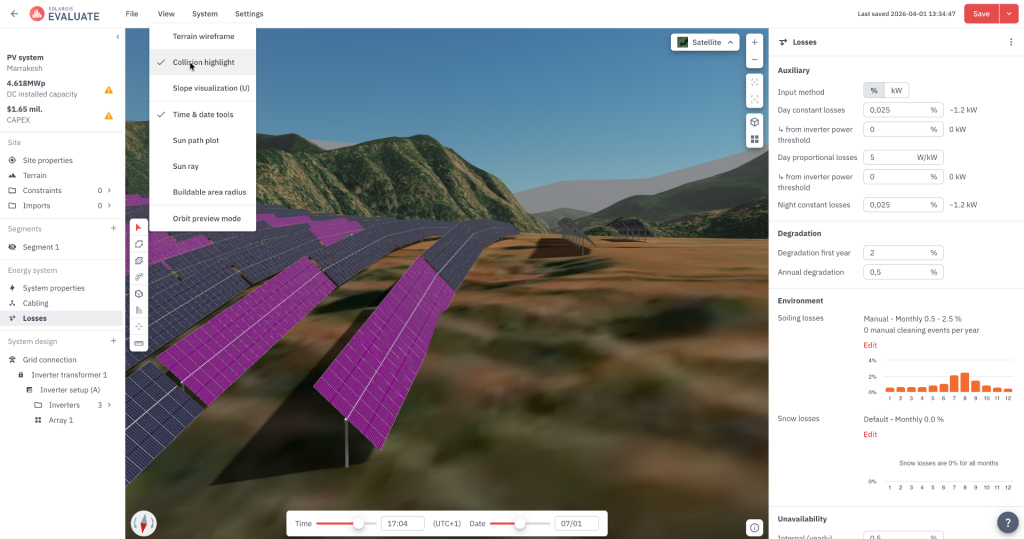
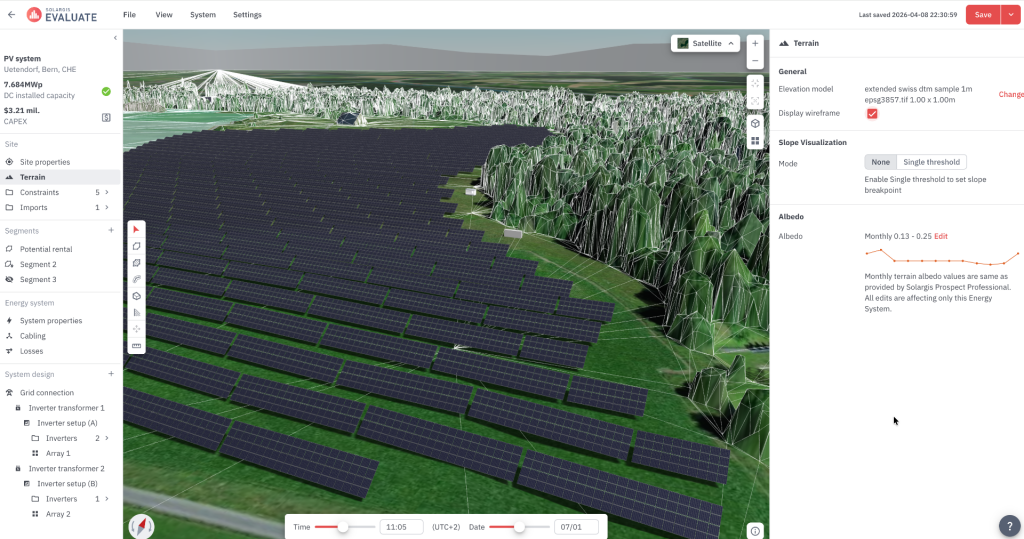
Image 3: Table collision highlights in the Solargis Evaluate Energy system designer section and the option to enable/disable the feature.
Most engineers are familiar with slope limits. At some point, a surface is simply too steep for economically reasonable construction and maintenance. But slope magnitude alone does not describe terrain suitability. A given slope angle can have very different implications depending on whether it faces south or north. The same grade can either support favourable module orientation or create persistent shading and access problems.
That is why terrain azimuth, the directional orientation of slopes, deserves to be treated as a first-order design variable rather than an afterthought.
In practice, the best terrain-aware decisions come from combining slope magnitude, slope direction, and local shading context into a single constraint view, rather than relying on a single “maximum slope” number.
Terrain affects more than shading and irradiance. It also changes the effective tilt and exposure of PV surfaces, which can influence how snow and soiling behave on the modules. Variations in surface inclination, wind exposure, and local weather conditions can affect how quickly snow slides off, how efficiently rainfall cleans the modules, and how long dirt or dust remains on the surface.
No simulation model can predict snow and soiling losses with perfect precision. But if terrain is ignored in the plant geometry, the loss assumptions may no longer reflect how the system is likely to perform in reality. For banks and investors, this can later translate into unexpected performance gaps. For engineers, it often leads to larger safety margins and greater uncertainty in the design.
If you are developing projects in complex terrain, one simple question is worth asking any simulation provider: how does your engine account for undulating terrain in the yield calculation itself? Does it simulate the same 3D geometry used in the design, or does it simplify the project into a flattened layout?
Terrain-adapted PV design is not about creating an impressive-looking 3D visualization of a solar plant. It is about making sure that the terrain-layout geometry used during design is the same geometry used during simulation, and that the site’s physical conditions and technical PV configuration are carried through to the bankable energy yield assessment.
When PV simulation is performed at the cell level using a realistic terrain model, the loss breakdown becomes more transparent. It becomes easier to distinguish losses caused by topography and weather from losses driven by design choices such as row spacing, tilt, or tracker configuration.
In markets where margins are tighter and risk is examined more closely, precision in terrain-aware modelling is no longer optional. It is becoming part of sound engineering practice.